為使工程機(jī)械發(fā)動(dòng)機(jī)輸出功率充足,、轉(zhuǎn)速穩(wěn)定,,并具有良好的經(jīng)濟(jì)性,,需配置適宜的轉(zhuǎn)速控制方法,。
今天修哥給大家介紹7種發(fā)動(dòng)機(jī)轉(zhuǎn)速控制方法,。
1.機(jī)械拉桿控制
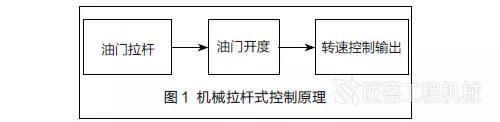
傳統(tǒng)機(jī)械式噴油泵調(diào)速器的發(fā)動(dòng)機(jī)通常采用手動(dòng)拉桿調(diào)節(jié)發(fā)動(dòng)機(jī)噴油泵調(diào)速器,,以控制油門的開啟量,進(jìn)而控制發(fā)動(dòng)機(jī)轉(zhuǎn)速,,其控制原理如圖1所示,。
這種方法結(jié)構(gòu)簡單、成本低廉,、可靠性高,。但是扳動(dòng)拉桿時(shí)需要有一定的力度,轉(zhuǎn)速控制精度較低,無法實(shí)現(xiàn)自動(dòng)控制,。
2.電位計(jì)比例控制
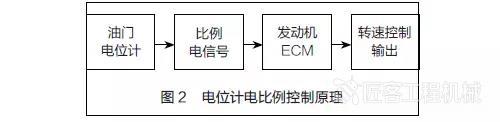
配置電噴式發(fā)動(dòng)機(jī)的工程機(jī)械,,發(fā)動(dòng)機(jī)轉(zhuǎn)速采用油門電位計(jì)(也稱油門旋鈕)控制,電位計(jì)可由駕駛員控制,,輸出比例電壓或電流控制信號給發(fā)動(dòng)機(jī)控制器(ECM),,控制器根據(jù)接收的電比例信號,向發(fā)動(dòng)機(jī)噴油泵,、噴油器輸出相應(yīng)的油量信號,,對發(fā)動(dòng)機(jī)轉(zhuǎn)速進(jìn)行控制,其原理如圖2所示,。
這種控制方法操縱輕便,、轉(zhuǎn)速控制精度高,依靠發(fā)動(dòng)機(jī)自帶的控制器控制轉(zhuǎn)速,,增加的成本不多,。但是沒有與工程機(jī)械的控制系統(tǒng)實(shí)現(xiàn)通信聯(lián)系,無法實(shí)現(xiàn)自動(dòng)控制,。
3.CAN總線控制
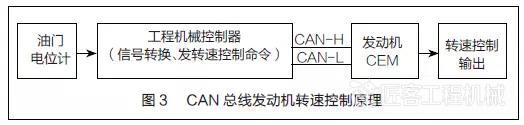
CAN總線在工程機(jī)械控制器中應(yīng)用越來越廣泛,,其方便的數(shù)據(jù)交換與處理方式,可使發(fā)動(dòng)機(jī)轉(zhuǎn)速控制信號與工程機(jī)械控制信號實(shí)現(xiàn)交互傳遞,,操作人員通過油門電位計(jì)將發(fā)動(dòng)機(jī)轉(zhuǎn)速信號傳送給工程機(jī)械控制器,,工程機(jī)械控制器接收到轉(zhuǎn)速控制信號后,將其轉(zhuǎn)化為數(shù)字量,,再將控制信號通過CAN總線發(fā)送給發(fā)動(dòng)機(jī)控制器(ECM)轉(zhuǎn)速控制單元,,發(fā)動(dòng)機(jī)控制器根據(jù)接受的轉(zhuǎn)速請求信號,將發(fā)動(dòng)機(jī)控制在相應(yīng)的轉(zhuǎn)速,。采用CAN總線控制原理如圖3所示,。
CAN總線控制方法可以使發(fā)動(dòng)機(jī)轉(zhuǎn)數(shù)控制更加可靠、精確,,同時(shí)減少了工程機(jī)械及發(fā)動(dòng)機(jī)的控制線,。
4.一鍵怠速控制
設(shè)有一鍵怠速的工程機(jī)械,當(dāng)發(fā)動(dòng)機(jī)空載,、操作人員短暫離機(jī)或等待作業(yè)時(shí),,操作人員可以啟動(dòng)一鍵怠速按鈕,工程機(jī)械控制器接收到一鍵怠速指令后,,將設(shè)定的發(fā)動(dòng)機(jī)怠速值通過CAN總線傳送給發(fā)動(dòng)機(jī)控制器(ECM),,發(fā)動(dòng)機(jī)控制器根據(jù)“一鍵怠速”請求的怠速值,控制發(fā)動(dòng)機(jī)處于怠速狀態(tài),。一鍵怠速控制原理如圖4所示,。
工程機(jī)械設(shè)置一鍵怠速,,可避免發(fā)動(dòng)機(jī)高速空載運(yùn)行,能夠方便的將發(fā)動(dòng)機(jī)轉(zhuǎn)速降至怠速值,,可起到環(huán)保節(jié)能作用,。

5.自動(dòng)怠速控制
工程機(jī)械工作時(shí),很多時(shí)候處在斷續(xù)負(fù)荷狀態(tài),,設(shè)置自動(dòng)怠速功能,,可以讓發(fā)動(dòng)機(jī)在空載時(shí)自動(dòng)在怠速狀態(tài)下運(yùn)行。
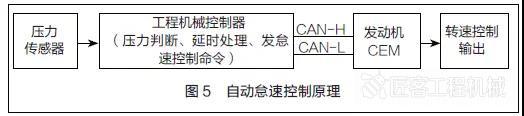
自動(dòng)怠速的關(guān)鍵是判斷啟動(dòng)怠速的條件,,通常由壓力傳感器檢測工作裝置控制閥進(jìn)口壓力,,如果壓力傳感器檢測到控制閥進(jìn)口壓力低于設(shè)定值,壓力傳感器將信號傳遞給工程機(jī)械控制器,,工程機(jī)械控制器即可判斷應(yīng)將發(fā)動(dòng)機(jī)從工作狀態(tài)轉(zhuǎn)變?yōu)榈∷贍顟B(tài),。
工程機(jī)械作業(yè)中的每個(gè)動(dòng)作,控制閥進(jìn)口壓力值均有波動(dòng),,有時(shí)處于低負(fù)載,、低壓狀態(tài)。為了避免自動(dòng)怠速誤操作,,可在工程機(jī)械控制器內(nèi)設(shè)定延時(shí)檢測,。如果控制閥進(jìn)口低壓狀態(tài)延時(shí)一定時(shí)間,壓力依然處在低壓值狀態(tài),,就可以判斷發(fā)動(dòng)機(jī)可以進(jìn)入怠速狀態(tài),。這樣還可以避免發(fā)動(dòng)機(jī)在怠速和設(shè)定油門轉(zhuǎn)速之間頻繁切換,,減小頻繁調(diào)速對發(fā)動(dòng)機(jī)的損害,。自動(dòng)怠速控制原理如圖5所示。
自動(dòng)怠速在工程機(jī)械上的應(yīng)用,,可以使怠速狀態(tài)啟用與關(guān)閉實(shí)現(xiàn)自動(dòng)控制,,智能化程度高,節(jié)能效果更好,。
6.發(fā)動(dòng)機(jī)強(qiáng)制轉(zhuǎn)速控制
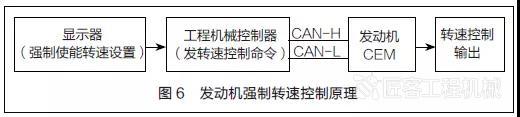
有些工程機(jī)械在某些工況時(shí)對發(fā)動(dòng)機(jī)轉(zhuǎn)速值要求較高,,為此可將工程機(jī)械控制器、發(fā)動(dòng)機(jī)控制器(ECU)及顯示器之間建立通信聯(lián)系,。工程機(jī)械作業(yè)前,,通過顯示器按鍵強(qiáng)制設(shè)定發(fā)動(dòng)機(jī)轉(zhuǎn)速值,當(dāng)工程機(jī)械處于該工況時(shí),,工程機(jī)械控制器就會強(qiáng)制啟動(dòng)轉(zhuǎn)速控制功能,,將設(shè)定的轉(zhuǎn)速值發(fā)送到發(fā)動(dòng)機(jī)控制器,發(fā)動(dòng)機(jī)控制器根據(jù)轉(zhuǎn)速設(shè)定值控制發(fā)動(dòng)機(jī)轉(zhuǎn)速,,使發(fā)動(dòng)機(jī)在該工況以相應(yīng)的轉(zhuǎn)速運(yùn)轉(zhuǎn),,此時(shí)發(fā)動(dòng)機(jī)轉(zhuǎn)速不再受油門電位計(jì)控制,。若需受油門電位計(jì)控制,需解除強(qiáng)制轉(zhuǎn)速控制功能,。強(qiáng)制轉(zhuǎn)速控制原理如圖6所示,。
強(qiáng)制轉(zhuǎn)速控制功能自動(dòng)化程度更高,可以實(shí)現(xiàn)發(fā)動(dòng)機(jī)轉(zhuǎn)速的自動(dòng)控制,。
7.極載功率控制
工程機(jī)械一般是高速,、全負(fù)荷運(yùn)行,當(dāng)出現(xiàn)超負(fù)荷工況時(shí),,發(fā)動(dòng)機(jī)會出現(xiàn)掉轉(zhuǎn)甚至熄火情況,。當(dāng)發(fā)動(dòng)機(jī)功率達(dá)到極限時(shí),若要將發(fā)動(dòng)機(jī)轉(zhuǎn)速控制在穩(wěn)定狀態(tài),,就必須降低工程機(jī)械負(fù)荷,。
極載功率控制是負(fù)載壓力傳感器檢測負(fù)載超出極限范圍時(shí),將信號傳遞給工程機(jī)械控制器,,工程機(jī)械控制器通過改變液壓元件如馬達(dá)或泵的排量來降低負(fù)載負(fù)荷,,對功率進(jìn)行限制,防止發(fā)動(dòng)機(jī)掉轉(zhuǎn)或熄火,,使發(fā)動(dòng)機(jī)能夠繼續(xù)維持運(yùn)轉(zhuǎn),,極載功率控制原理如圖7所示。
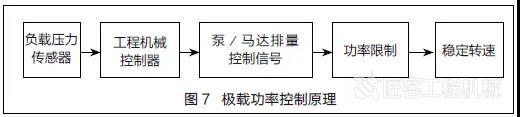
這種穩(wěn)定發(fā)動(dòng)機(jī)轉(zhuǎn)速的方法是一種間接控制方法,,目的是防止工程機(jī)械及發(fā)動(dòng)機(jī)在超負(fù)荷工況下運(yùn)轉(zhuǎn),,避免工程機(jī)械及發(fā)動(dòng)機(jī)出現(xiàn)故障或損壞。
隨著發(fā)動(dòng)機(jī)控制技術(shù)的發(fā)展,,會有更多節(jié)能高效的發(fā)動(dòng)機(jī)轉(zhuǎn)速控制方法應(yīng)用于工程機(jī)械中,。
 工程機(jī)械與維修
工程機(jī)械與維修 今日工程機(jī)械
今日工程機(jī)械
修機(jī)丨工程機(jī)械發(fā)動(dòng)機(jī)的七種轉(zhuǎn)速控制方法,,最后一種估計(jì)你沒聽過
匠客工程機(jī)械 評論(0)
來源:匠客工程機(jī)械
為使工程機(jī)械發(fā)動(dòng)機(jī)輸出功率充足,、轉(zhuǎn)速穩(wěn)定,,并具有良好的經(jīng)濟(jì)性,,需配置適宜的轉(zhuǎn)速控制方法,。
今天修哥給大家介紹7種發(fā)動(dòng)機(jī)轉(zhuǎn)速控制方法,。
1.機(jī)械拉桿控制
傳統(tǒng)機(jī)械式噴油泵調(diào)速器的發(fā)動(dòng)機(jī)通常采用手動(dòng)拉桿調(diào)節(jié)發(fā)動(dòng)機(jī)噴油泵調(diào)速器,,以控制油門的開啟量,進(jìn)而控制發(fā)動(dòng)機(jī)轉(zhuǎn)速,,其控制原理如圖1所示,。
這種方法結(jié)構(gòu)簡單、成本低廉,、可靠性高,。但是扳動(dòng)拉桿時(shí)需要有一定的力度,轉(zhuǎn)速控制精度較低,無法實(shí)現(xiàn)自動(dòng)控制,。
2.電位計(jì)比例控制
配置電噴式發(fā)動(dòng)機(jī)的工程機(jī)械,,發(fā)動(dòng)機(jī)轉(zhuǎn)速采用油門電位計(jì)(也稱油門旋鈕)控制,電位計(jì)可由駕駛員控制,,輸出比例電壓或電流控制信號給發(fā)動(dòng)機(jī)控制器(ECM),,控制器根據(jù)接收的電比例信號,向發(fā)動(dòng)機(jī)噴油泵,、噴油器輸出相應(yīng)的油量信號,,對發(fā)動(dòng)機(jī)轉(zhuǎn)速進(jìn)行控制,其原理如圖2所示,。
這種控制方法操縱輕便,、轉(zhuǎn)速控制精度高,依靠發(fā)動(dòng)機(jī)自帶的控制器控制轉(zhuǎn)速,,增加的成本不多,。但是沒有與工程機(jī)械的控制系統(tǒng)實(shí)現(xiàn)通信聯(lián)系,無法實(shí)現(xiàn)自動(dòng)控制,。
3.CAN總線控制
CAN總線在工程機(jī)械控制器中應(yīng)用越來越廣泛,,其方便的數(shù)據(jù)交換與處理方式,可使發(fā)動(dòng)機(jī)轉(zhuǎn)速控制信號與工程機(jī)械控制信號實(shí)現(xiàn)交互傳遞,,操作人員通過油門電位計(jì)將發(fā)動(dòng)機(jī)轉(zhuǎn)速信號傳送給工程機(jī)械控制器,,工程機(jī)械控制器接收到轉(zhuǎn)速控制信號后,將其轉(zhuǎn)化為數(shù)字量,,再將控制信號通過CAN總線發(fā)送給發(fā)動(dòng)機(jī)控制器(ECM)轉(zhuǎn)速控制單元,,發(fā)動(dòng)機(jī)控制器根據(jù)接受的轉(zhuǎn)速請求信號,將發(fā)動(dòng)機(jī)控制在相應(yīng)的轉(zhuǎn)速,。采用CAN總線控制原理如圖3所示,。
CAN總線控制方法可以使發(fā)動(dòng)機(jī)轉(zhuǎn)數(shù)控制更加可靠、精確,,同時(shí)減少了工程機(jī)械及發(fā)動(dòng)機(jī)的控制線,。
4.一鍵怠速控制
設(shè)有一鍵怠速的工程機(jī)械,當(dāng)發(fā)動(dòng)機(jī)空載,、操作人員短暫離機(jī)或等待作業(yè)時(shí),,操作人員可以啟動(dòng)一鍵怠速按鈕,工程機(jī)械控制器接收到一鍵怠速指令后,,將設(shè)定的發(fā)動(dòng)機(jī)怠速值通過CAN總線傳送給發(fā)動(dòng)機(jī)控制器(ECM),,發(fā)動(dòng)機(jī)控制器根據(jù)“一鍵怠速”請求的怠速值,控制發(fā)動(dòng)機(jī)處于怠速狀態(tài),。一鍵怠速控制原理如圖4所示,。
工程機(jī)械設(shè)置一鍵怠速,,可避免發(fā)動(dòng)機(jī)高速空載運(yùn)行,能夠方便的將發(fā)動(dòng)機(jī)轉(zhuǎn)速降至怠速值,,可起到環(huán)保節(jié)能作用,。
5.自動(dòng)怠速控制
工程機(jī)械工作時(shí),很多時(shí)候處在斷續(xù)負(fù)荷狀態(tài),,設(shè)置自動(dòng)怠速功能,,可以讓發(fā)動(dòng)機(jī)在空載時(shí)自動(dòng)在怠速狀態(tài)下運(yùn)行。
自動(dòng)怠速的關(guān)鍵是判斷啟動(dòng)怠速的條件,,通常由壓力傳感器檢測工作裝置控制閥進(jìn)口壓力,,如果壓力傳感器檢測到控制閥進(jìn)口壓力低于設(shè)定值,壓力傳感器將信號傳遞給工程機(jī)械控制器,,工程機(jī)械控制器即可判斷應(yīng)將發(fā)動(dòng)機(jī)從工作狀態(tài)轉(zhuǎn)變?yōu)榈∷贍顟B(tài),。
工程機(jī)械作業(yè)中的每個(gè)動(dòng)作,控制閥進(jìn)口壓力值均有波動(dòng),,有時(shí)處于低負(fù)載,、低壓狀態(tài)。為了避免自動(dòng)怠速誤操作,,可在工程機(jī)械控制器內(nèi)設(shè)定延時(shí)檢測,。如果控制閥進(jìn)口低壓狀態(tài)延時(shí)一定時(shí)間,壓力依然處在低壓值狀態(tài),,就可以判斷發(fā)動(dòng)機(jī)可以進(jìn)入怠速狀態(tài),。這樣還可以避免發(fā)動(dòng)機(jī)在怠速和設(shè)定油門轉(zhuǎn)速之間頻繁切換,,減小頻繁調(diào)速對發(fā)動(dòng)機(jī)的損害,。自動(dòng)怠速控制原理如圖5所示。
自動(dòng)怠速在工程機(jī)械上的應(yīng)用,,可以使怠速狀態(tài)啟用與關(guān)閉實(shí)現(xiàn)自動(dòng)控制,,智能化程度高,節(jié)能效果更好,。
6.發(fā)動(dòng)機(jī)強(qiáng)制轉(zhuǎn)速控制
有些工程機(jī)械在某些工況時(shí)對發(fā)動(dòng)機(jī)轉(zhuǎn)速值要求較高,,為此可將工程機(jī)械控制器、發(fā)動(dòng)機(jī)控制器(ECU)及顯示器之間建立通信聯(lián)系,。工程機(jī)械作業(yè)前,,通過顯示器按鍵強(qiáng)制設(shè)定發(fā)動(dòng)機(jī)轉(zhuǎn)速值,當(dāng)工程機(jī)械處于該工況時(shí),,工程機(jī)械控制器就會強(qiáng)制啟動(dòng)轉(zhuǎn)速控制功能,,將設(shè)定的轉(zhuǎn)速值發(fā)送到發(fā)動(dòng)機(jī)控制器,發(fā)動(dòng)機(jī)控制器根據(jù)轉(zhuǎn)速設(shè)定值控制發(fā)動(dòng)機(jī)轉(zhuǎn)速,,使發(fā)動(dòng)機(jī)在該工況以相應(yīng)的轉(zhuǎn)速運(yùn)轉(zhuǎn),,此時(shí)發(fā)動(dòng)機(jī)轉(zhuǎn)速不再受油門電位計(jì)控制,。若需受油門電位計(jì)控制,需解除強(qiáng)制轉(zhuǎn)速控制功能,。強(qiáng)制轉(zhuǎn)速控制原理如圖6所示,。
強(qiáng)制轉(zhuǎn)速控制功能自動(dòng)化程度更高,可以實(shí)現(xiàn)發(fā)動(dòng)機(jī)轉(zhuǎn)速的自動(dòng)控制,。
7.極載功率控制
工程機(jī)械一般是高速,、全負(fù)荷運(yùn)行,當(dāng)出現(xiàn)超負(fù)荷工況時(shí),,發(fā)動(dòng)機(jī)會出現(xiàn)掉轉(zhuǎn)甚至熄火情況,。當(dāng)發(fā)動(dòng)機(jī)功率達(dá)到極限時(shí),若要將發(fā)動(dòng)機(jī)轉(zhuǎn)速控制在穩(wěn)定狀態(tài),,就必須降低工程機(jī)械負(fù)荷,。
極載功率控制是負(fù)載壓力傳感器檢測負(fù)載超出極限范圍時(shí),將信號傳遞給工程機(jī)械控制器,,工程機(jī)械控制器通過改變液壓元件如馬達(dá)或泵的排量來降低負(fù)載負(fù)荷,,對功率進(jìn)行限制,防止發(fā)動(dòng)機(jī)掉轉(zhuǎn)或熄火,,使發(fā)動(dòng)機(jī)能夠繼續(xù)維持運(yùn)轉(zhuǎn),,極載功率控制原理如圖7所示。
這種穩(wěn)定發(fā)動(dòng)機(jī)轉(zhuǎn)速的方法是一種間接控制方法,,目的是防止工程機(jī)械及發(fā)動(dòng)機(jī)在超負(fù)荷工況下運(yùn)轉(zhuǎn),,避免工程機(jī)械及發(fā)動(dòng)機(jī)出現(xiàn)故障或損壞。
隨著發(fā)動(dòng)機(jī)控制技術(shù)的發(fā)展,,會有更多節(jié)能高效的發(fā)動(dòng)機(jī)轉(zhuǎn)速控制方法應(yīng)用于工程機(jī)械中,。
敬請關(guān)注 《工程機(jī)械與維修》&《今日工程機(jī)械》 官方微信
更多精彩內(nèi)容,請關(guān)注《工程機(jī)械與維修》與《今日工程機(jī)械》官方微信