1 故障現(xiàn)象
對我公司生產(chǎn)的某型號高空作業(yè)車進(jìn)行調(diào)試時(shí),,操作人員發(fā)現(xiàn)操縱動臂起升時(shí)出現(xiàn)異常,,即在高空作業(yè)平臺上操縱動臂起升時(shí)出現(xiàn)輕微抖動現(xiàn)象,而在下部轉(zhuǎn)臺處操縱動臂起升時(shí)卻正常,。
2 工作原理
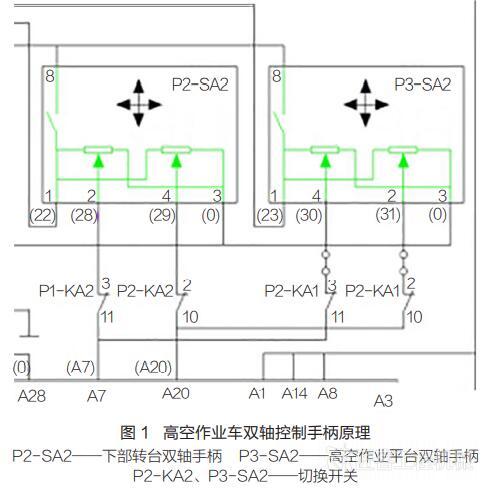
該高空作業(yè)車是通過操縱控制面板上的雙軸控制手柄實(shí)現(xiàn)動臂變幅動作,,雙軸控制手柄控制電位器原理如圖 1所示。P2-SA2、P3-SA2 分別為下部轉(zhuǎn)臺及高空作業(yè)平臺的雙軸手柄,,通過 P2-KA2、P2-KA1 進(jìn)行轉(zhuǎn)臺,、平臺操作的線路切換,。扳動雙軸手柄后,其電位器輸出模擬量數(shù)據(jù)信號到控制器的 A7,、A20 端,,再由控制器輸出電流給電磁閥使液壓系統(tǒng)動作,實(shí)現(xiàn)動臂變幅,。
3 故障排查
3.1 排查雙軸手柄
技術(shù)人員排查高空作業(yè)平臺雙軸手柄處的接地狀況良好,。通過控制器的顯示器觀察手柄模擬量電流,2 個(gè)雙軸手柄滿行程時(shí)均為 1024mA,,轉(zhuǎn)臺處手柄波動量為±3mA,,數(shù)據(jù)正常;高空作業(yè)平臺處手柄電流波動量為±6 mA,,但操縱手柄進(jìn)行變幅(控制器 A7 端口)至最大行程時(shí),,電流存在較大的瞬間波動,其值 >50 mA,。操縱高空作業(yè)平臺與轉(zhuǎn)臺之間的切換正常,,由此排除切換程序有故障的可能。
3.2 排查控制器
使用獨(dú)立的 5V 模塊為控制器供電,,故障現(xiàn)象沒有改變,,由此排除控制器 5V 供電有故障的可能性。按動屏蔽使能按鍵,,故障現(xiàn)象沒有改變,,可排除控制器使能按鍵電路有故障的可能性。
在使能信號輸入線路增加二極管,,屏蔽并聯(lián)線路的干擾,,故障仍無改變,由此排除使能干擾有故障的可能,。
3.3 排查線路
對調(diào)高空作業(yè)平臺手柄線路,,即手柄右側(cè)接線改為右側(cè)接線,仍為控制器 A7 端口輸出異常,,由此排除手柄自身線路有故障的可能,。
對調(diào)控制動臂與控制回轉(zhuǎn)的線路,即 A7 線改為 A20 線,,仍為控制器 A7 端口有故障,,由此排除動臂電纜有故障的可能,。
使用獨(dú)立的三芯電纜線連接 5V 模塊供電、使能信號線供電,、手柄信號線供電,,故障仍無改變,由此可以排除動臂電纜有故障的可能,。再使用較長的三芯電纜與轉(zhuǎn)臺手柄進(jìn)行接線,,模擬較長線路的傳輸工況,轉(zhuǎn)臺處操縱動臂起升并未發(fā)生故障,。由此懷疑故障點(diǎn)仍在于高空作業(yè)平臺的接地環(huán)節(jié)有故障,,但轉(zhuǎn)臺與高空作業(yè)平臺的接地電平偏差在該類設(shè)備中普遍存在,并未對其他設(shè)備的控制器端口產(chǎn)生影響,。
4 解決方法
綜合以上排查得出的結(jié)論,,各種對調(diào)試驗(yàn)時(shí)出現(xiàn)異常始終指向 A7 端口,判斷故障點(diǎn)為控制器 A7 端口在高空作業(yè)平臺和轉(zhuǎn)臺工況的導(dǎo)電性能存在差異時(shí),,無法適應(yīng)高空作業(yè)平臺操縱工況,。
由于控制器線路修改難度大,且修改后該控制器所有端口都會受到影響,,可判斷控制器端口有故障,。更換控制器后試機(jī),故障現(xiàn)象消失,。
來源《工程機(jī)械與維修》2019年第4期
 工程機(jī)械與維修
工程機(jī)械與維修 今日工程機(jī)械
今日工程機(jī)械
修機(jī)|高空作業(yè)車動臂起升時(shí)出現(xiàn)抖動的故障排查
匠客工程機(jī)械 評論(0)
來源:匠客工程機(jī)械
1 故障現(xiàn)象
對我公司生產(chǎn)的某型號高空作業(yè)車進(jìn)行調(diào)試時(shí),,操作人員發(fā)現(xiàn)操縱動臂起升時(shí)出現(xiàn)異常,,即在高空作業(yè)平臺上操縱動臂起升時(shí)出現(xiàn)輕微抖動現(xiàn)象,而在下部轉(zhuǎn)臺處操縱動臂起升時(shí)卻正常,。
2 工作原理
該高空作業(yè)車是通過操縱控制面板上的雙軸控制手柄實(shí)現(xiàn)動臂變幅動作,,雙軸控制手柄控制電位器原理如圖 1所示。P2-SA2、P3-SA2 分別為下部轉(zhuǎn)臺及高空作業(yè)平臺的雙軸手柄,,通過 P2-KA2、P2-KA1 進(jìn)行轉(zhuǎn)臺,、平臺操作的線路切換,。扳動雙軸手柄后,其電位器輸出模擬量數(shù)據(jù)信號到控制器的 A7,、A20 端,,再由控制器輸出電流給電磁閥使液壓系統(tǒng)動作,實(shí)現(xiàn)動臂變幅,。
3 故障排查
3.1 排查雙軸手柄
技術(shù)人員排查高空作業(yè)平臺雙軸手柄處的接地狀況良好,。通過控制器的顯示器觀察手柄模擬量電流,2 個(gè)雙軸手柄滿行程時(shí)均為 1024mA,,轉(zhuǎn)臺處手柄波動量為±3mA,,數(shù)據(jù)正常;高空作業(yè)平臺處手柄電流波動量為±6 mA,,但操縱手柄進(jìn)行變幅(控制器 A7 端口)至最大行程時(shí),,電流存在較大的瞬間波動,其值 >50 mA,。操縱高空作業(yè)平臺與轉(zhuǎn)臺之間的切換正常,,由此排除切換程序有故障的可能。
3.2 排查控制器
使用獨(dú)立的 5V 模塊為控制器供電,,故障現(xiàn)象沒有改變,,由此排除控制器 5V 供電有故障的可能性。按動屏蔽使能按鍵,,故障現(xiàn)象沒有改變,,可排除控制器使能按鍵電路有故障的可能性。
在使能信號輸入線路增加二極管,,屏蔽并聯(lián)線路的干擾,,故障仍無改變,由此排除使能干擾有故障的可能,。
3.3 排查線路
對調(diào)高空作業(yè)平臺手柄線路,,即手柄右側(cè)接線改為右側(cè)接線,仍為控制器 A7 端口輸出異常,,由此排除手柄自身線路有故障的可能,。
對調(diào)控制動臂與控制回轉(zhuǎn)的線路,即 A7 線改為 A20 線,,仍為控制器 A7 端口有故障,,由此排除動臂電纜有故障的可能,。
使用獨(dú)立的三芯電纜線連接 5V 模塊供電、使能信號線供電,、手柄信號線供電,,故障仍無改變,由此可以排除動臂電纜有故障的可能,。再使用較長的三芯電纜與轉(zhuǎn)臺手柄進(jìn)行接線,,模擬較長線路的傳輸工況,轉(zhuǎn)臺處操縱動臂起升并未發(fā)生故障,。由此懷疑故障點(diǎn)仍在于高空作業(yè)平臺的接地環(huán)節(jié)有故障,,但轉(zhuǎn)臺與高空作業(yè)平臺的接地電平偏差在該類設(shè)備中普遍存在,并未對其他設(shè)備的控制器端口產(chǎn)生影響,。
4 解決方法
綜合以上排查得出的結(jié)論,,各種對調(diào)試驗(yàn)時(shí)出現(xiàn)異常始終指向 A7 端口,判斷故障點(diǎn)為控制器 A7 端口在高空作業(yè)平臺和轉(zhuǎn)臺工況的導(dǎo)電性能存在差異時(shí),,無法適應(yīng)高空作業(yè)平臺操縱工況,。
由于控制器線路修改難度大,且修改后該控制器所有端口都會受到影響,,可判斷控制器端口有故障,。更換控制器后試機(jī),故障現(xiàn)象消失,。
來源《工程機(jī)械與維修》2019年第4期
敬請關(guān)注 《工程機(jī)械與維修》&《今日工程機(jī)械》 官方微信
更多精彩內(nèi)容,,請關(guān)注《工程機(jī)械與維修》與《今日工程機(jī)械》官方微信